

DETR
End-to-End Object Detection with Transformers [源码] [论文]
DETR是一种基于Transformers的端到端的目标检测模型。
简化了Faster-RCNN、YOLO系列使用proposal-classifier的目标识别流程。
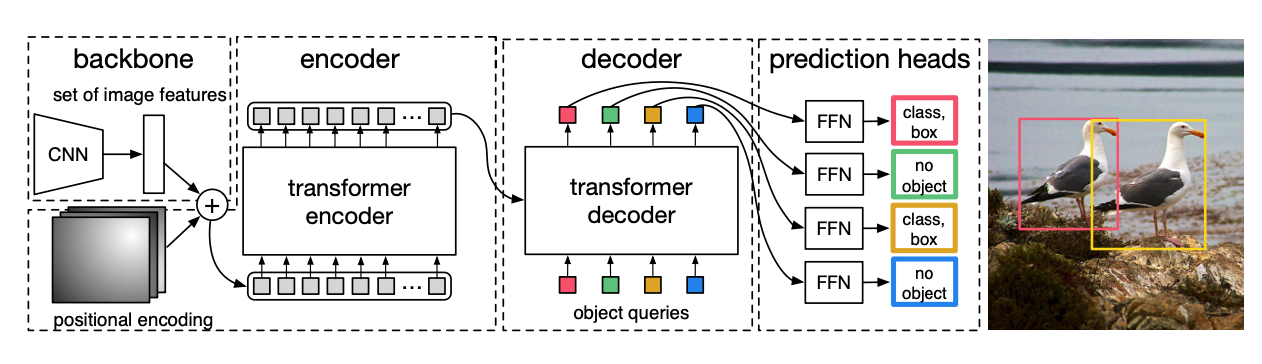
DETR的模型结构非常简单,下图把DETR的所有关键部分全部体现了出来:
- Backbone
- Embedding(positional_embeding, query_embeding)
- Encoder
- Decoder
- Feed Forward Network
先对模型的前馈流程,以及各个模块的详细组成进行简单介绍。
首先,在图像输入网络前,是需要对其进行尺寸调整的。因为在transformer推理的过程中,需要batch中所有样本的序列长度都一样,所以要把batch的所有图像调整到统一的尺寸。这里会对图像做padding,然后会通过一个mask来记录调整后图像中被padding的位置。mask尺寸为$(bs,H,W)$。
1. Backbone
输入一组图像,张量维度为$(bs,C,H,W)$。
Backbone使用的是Resnet,在经过特征提取后第四个block的输出,分辨率下降16倍,通道数为2048。
将Backbone的输出记为$(bs,2048,h,w)$。
2.Positional Encoding
源码中提供了两种Positional Encoding的方式,这也是目前两种主流的编码方式。
一种使用正余弦编码(相对位置编码),一种可学习的编码方式(绝对位置编码),两种编码方式在最后的结果中并无太大差异,接下来分别对其进行介绍。
2.1 Sinusoidal Position Encoding
在介绍二维的正余弦编码前,可以先回顾一下Attention is all you need 中的一维的正余弦编码。
其编码规则是这样的:
$PE_(pos,2i)=sin(pos/10000^{2i/d_{model}})$
$PE_(pos,2i+1)=cos(pos/10000^{2i/d_{model}})$
其中$pos$表示单词所处句子中的第$pos$个位置,$d_{model}$表示词向量的维度,$i$表示这个词向量的第i维。示例可见上一篇博客
而对于二维的正余弦编码,实际上就是单独对x方向,和单独对y方向编码,然后concat。
接下来通过代码详细解读一下:
1 | # 构建位置编码器,关键参数 N_steps = hidden_dim // 2 |
有一个关键参数N_steps = hidden_dim // 2,实际上hidden_dim就是输入Transformer中的向量的长度。
因为是将对x和对y方向编码的结果concat到一起,所以这里N_steps就为hidden_dim的一半。
接下来看二维的正余弦编码究竟是如何做的:
1 | def forward(self, tensor_list: NestedTensor): |
直接上图解:
mask $(bs, h , w)$ 中1代表图像padding的位置,0代表的是未经过padding的位置。首先取反的到not_mask,然后在h方向上进行累加,可以的到y_embed,在w方向上进行累加得到x_embed。
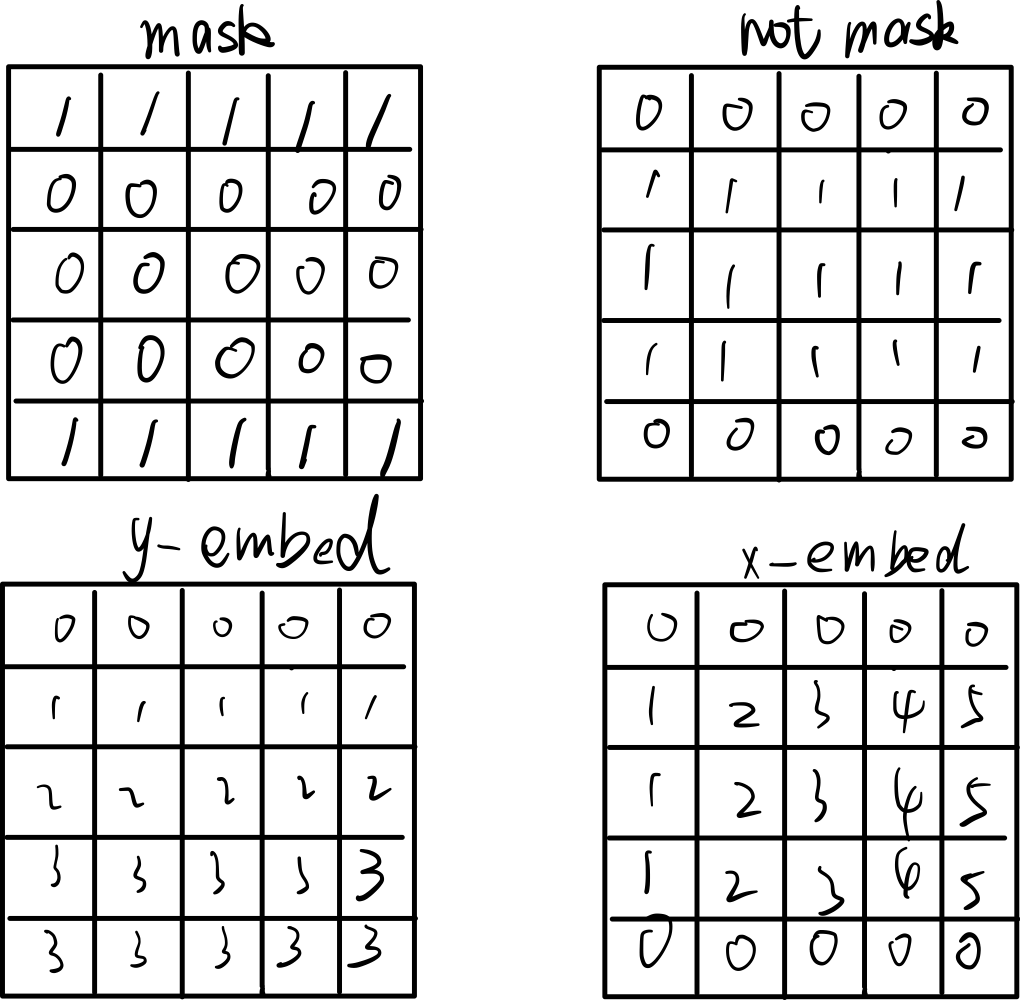
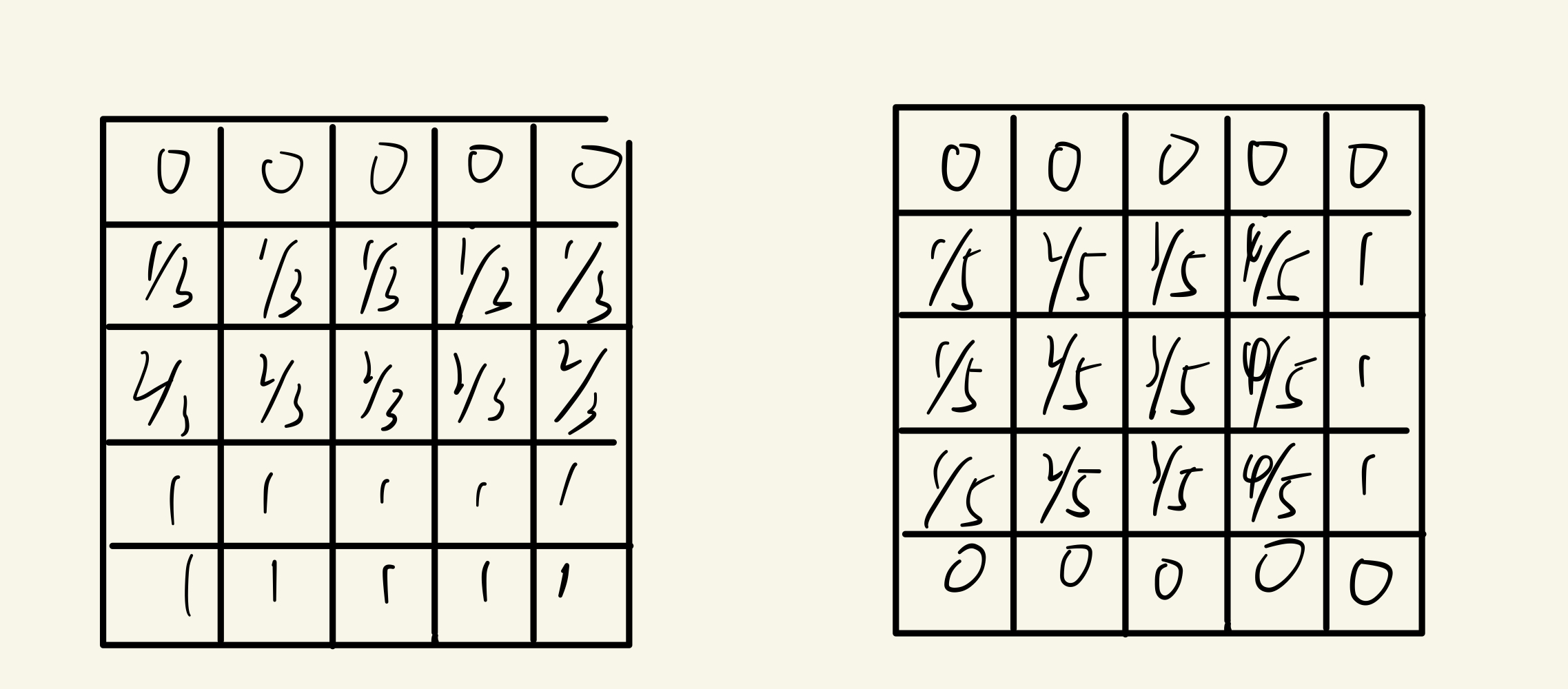
然后进行归一化(表格中的元素还要再乘以scale,scale为$2\pi$):
再生成一组dim_t,长度为N_steps。
以N_steps为64为例:$\{10000^{0/64},10000^{0/64},10000^{2/64},10000^{2/64},\dots,10000^{62/64},10000^{62/64}\}$
再将embed$(bs,h,w,1)$除上dim_t,得到pos_x,pos_y($bs, h, w, N_{steps}$),再进行正弦,余弦操作。
假设N_steps=64,以上图的情况为例,此时pos_y中第3行任意一列对应的位置编码为:
$\{sin(\frac{2}{3}10000^{0/64}), cos(\frac{2}{3}10000^{0/64}), sin(\frac{2}{3}10000^{2/64}), cos(\frac{2}{3}10000^{0/64}), \dots, sin(\frac{2}{3}10000^{62/64}),cos(\frac{2}{3}10000^{62/64})\}$
此时pos_x中第3列的第2,3,4行对应的位置编码为:
$\{sin(\frac{3}{5}10000^{0/64}), cos(\frac{3}{5}10000^{0/64}), sin(\frac{3}{5}10000^{2/64}), cos(\frac{3}{5}10000^{0/64}), \dots, sin(\frac{3}{5}10000^{62/64}),cos(\frac{3}{5}10000^{62/64})\}$
最后对pos_x和pos_y在第4维进行concat操作得到$(bs, h, w, 2N_{steps})$。
最后调整通道方便下一步操作$(bs, 2N_{steps},h,w)$
2.2 Learned Positional Embedding
可学习的位置编码相对简单。
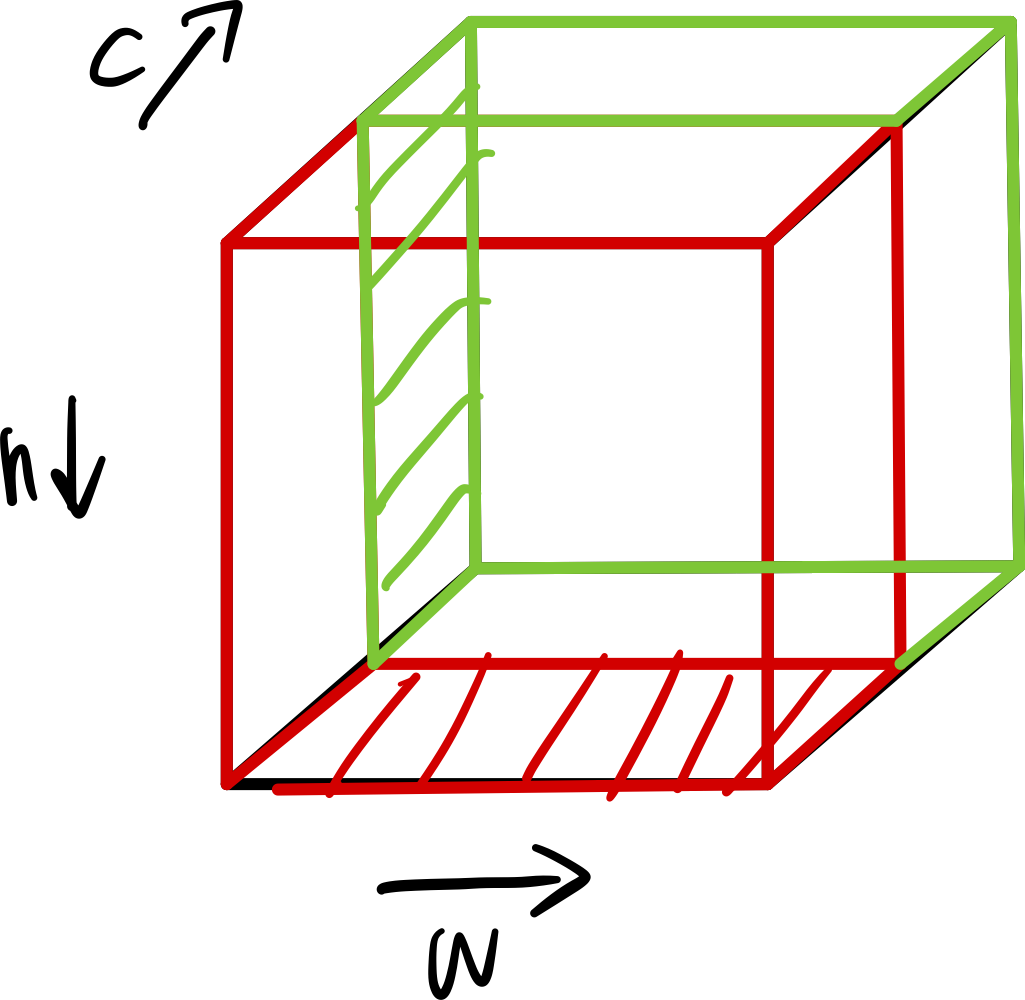
图像x尺寸调整后为$(c, h ,w)$,那么直接使用nn.Embedding(50, num_pos_features)对行和列进行随机初始化。
其中num_pos_features = N_steps = hidden_dim // 2。
x_emb:$(w, num_pos_features)$
y_emb:$(h,num_pos_features)$
然后如上图所示,x_emb向h方向复制(红色),y_emb向w方向复制(绿色),得到两个尺寸为$(h, w, num_pos_features)$的张量,再进行concat。
最终得到$(h, w, 2num_pos_features)$。
然后调整通道,方便下一步操作:$(bs, 2num_pos_features,h,w)$。
3 Transformer
在数据流向Transformer前, 我们已经有了三份数据:
- 经过backbone提取的特征图:$(bs, c, h, w)$
- 位置编码:$(bs, hidden_dim, h, w),~hidden_dim=d_model$
- 图像对应的mask:$(h, w)$
还要第四份数据:query_embeding,作为Decoder的输入,这一步放在Decoder介绍。
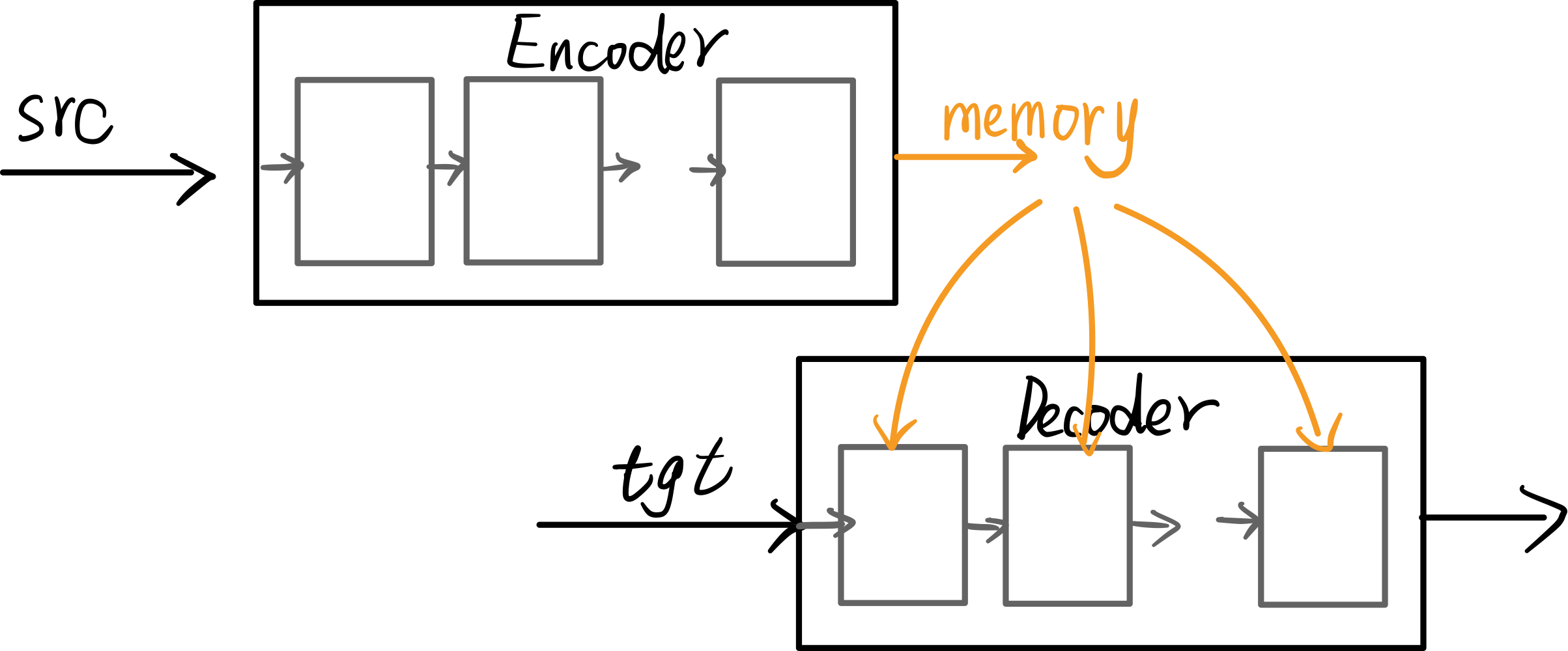
这里Transformer的整体结构与Attention is all you need中非常相似,这里主要关注Decoder的输入。
前处理:
Transformer的输入与卷积操作不同,需要对数据的格式进行一些变换。
首先为了降低计算量,减少特征图的通道数:$(bs, 2048, h, w) \to (bs, d_model, h, w) \to (hw, bs, d_model)$
位置编码则也要调整格式:$(bs,d_model,h,w) \to (hw, bs, d_model)$
mask也进行调整:$(h,w)\to(hw, )$
3.1 Encoder Layer
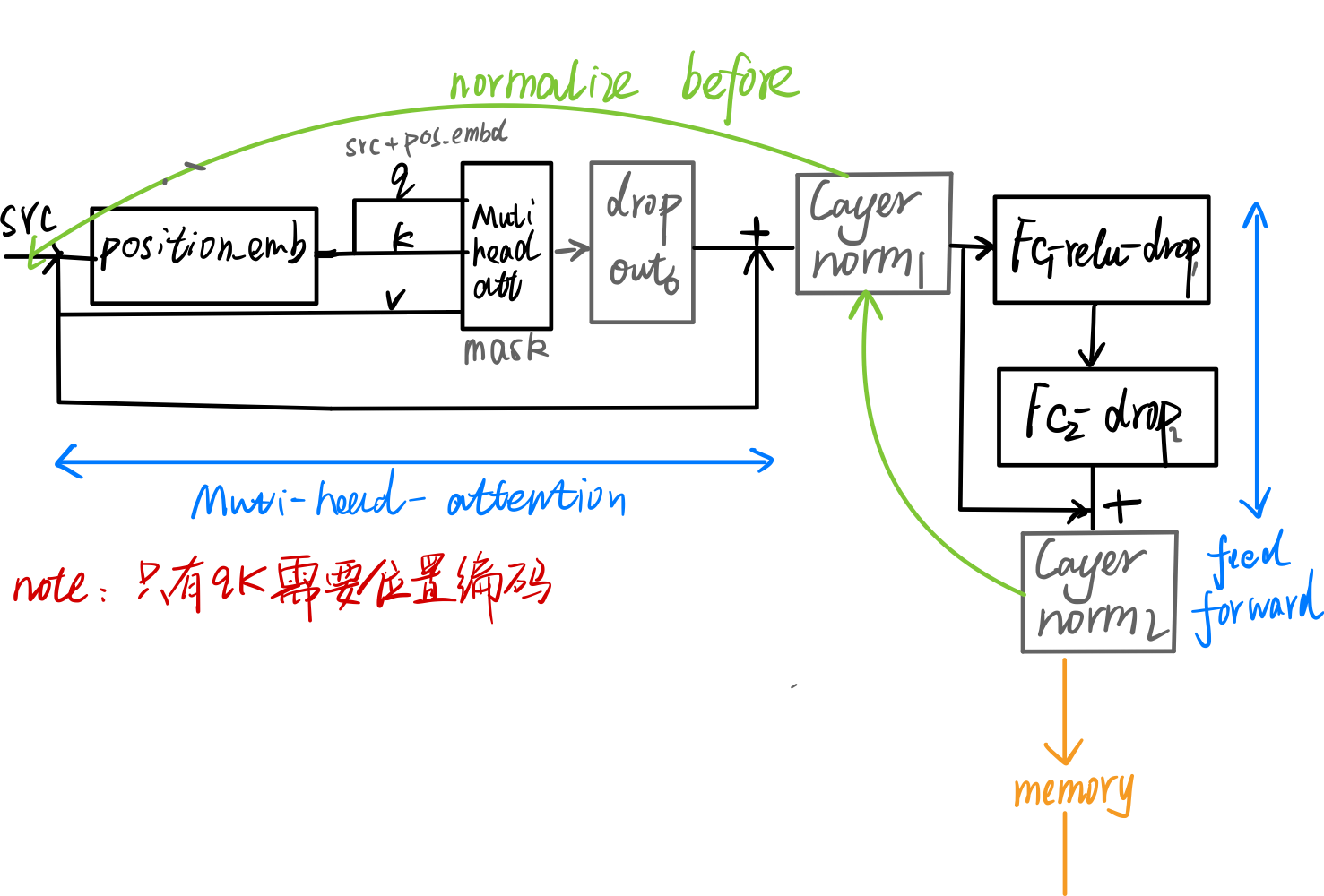
1 | def forward_post(self, |
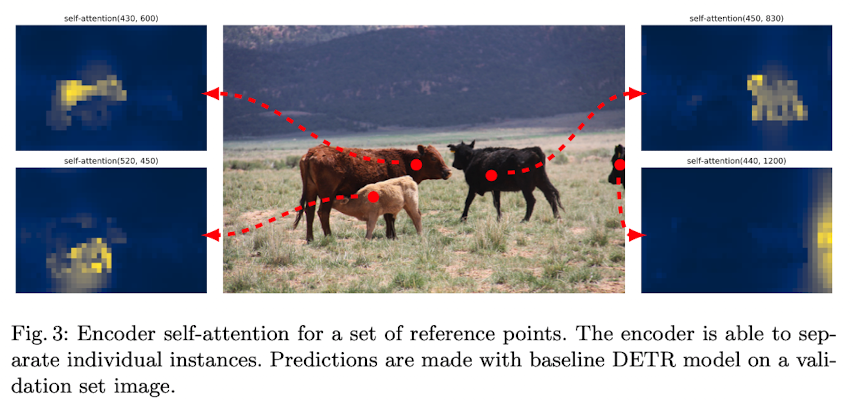
Encoder输入的是原图的特征图,输出的尺寸仍然保持不变,相当于每个像素的编码经过self-attention后都引入了其他像素点的信息,建立了原图区域之间的联系。
3.2 Decoder Layer
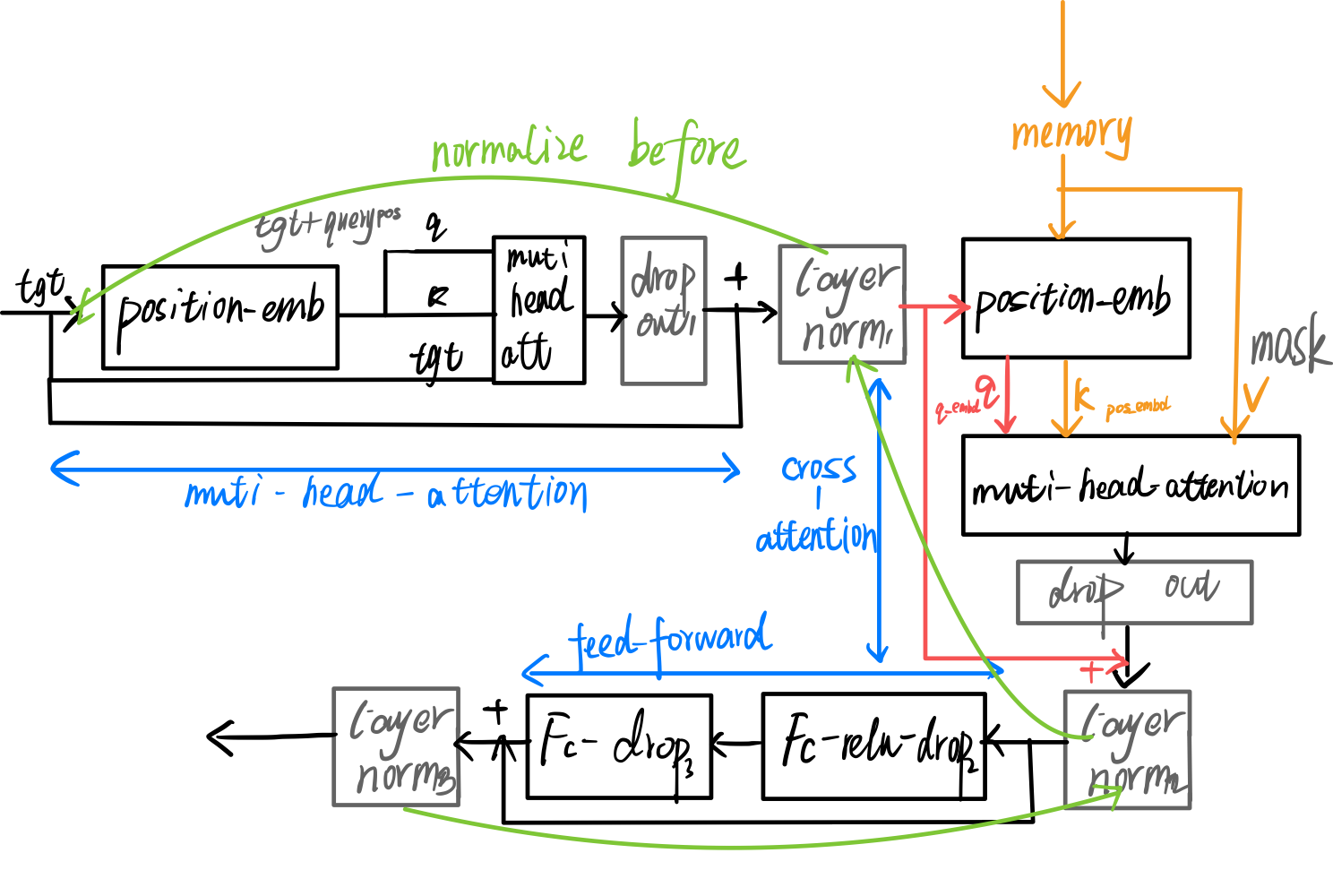
Decoder第一层的输入是一个初始化的维度为$(num_queries,d_model), num_queries=100$的全零张量作为输入。
然后再经过position_embeding,加上一个随初始化,可学习的query_embeding(和初始化的tgt同样尺寸)。
我们知道$Attention(Q,K,V) = Scorefunc(QK)V$
在cross-attention中,$q$来自全零张量,进行通道调整,还加上query_embeding:$(num_queries,bs,d_model)$
$k$来自Encoder的输出加上位置编码:$(hw, bs, d_model)$
$v$来自Encoder的输出:$(hw, bs, d_model)$
通过cross-attention,相当于将$num_queries$个查询,结合encoder输出的特征,得到了$num_queries$个目标。
最后Deocder的输出为$(num_queries, bs, d_model)$
4. FeedForward
最后接两组并行的全联接层,一组输出每个query对应的得分情况,一组输出每个query对应的bbox。